
About Me
Hi — I’m Dong Wang (王东), a Ph.D. candidate in Robotics at Julius-Maximilians-University Würzburg (JMU), supervised by Prof. Dr. Andreas Nüchter and Prof. Dr. Stefan May. My research focuses on SLAM and Spatial AI. I work on Multimodal Perception (LiDAR, radar, cameras, IMUs, ultrasound) that enable mobile robots to localize and map reliably in the exteme, dynamic conditions of the real world.
I hold an M.Sc. in Robotics from Friedrich-Alexander-Universität Erlangen-Nürnberg, where I devised a 3D pathplanning framework for multi-UAV systems, and a joint B.Sc.and B.Eng. in Mechatronics from Tongji University and the Nuremberg Institute of Technology.
Alongside my doctoral studies I
- work as a Research Assistant at JMU, supervising undergraduate thesis projects,
- have led the AutonOhm software team, winners at the RoboCup German Open Rescue 2021 and 2022 and 4 ᵗʰ place in Industrial @ Work 2023,
- and worked as a Software Developer at Evocortex GmbH from 2020 to 2024, delivering perception and autonomy stacks for next-generation AMRs and UAVs.
News
Our new work “Multi-Session Mapping and Long-Term Localization for Autonomous Vehicles Using Radar” was accepted for publication in the IEEE Robotics and Automation Letters (RA-L 2025)! (Dec. 2025)
I am delighted to have received the 2025 BayWiss Prize for “Outstanding or pioneering research achievements in the respective scientific field” in Bavaria, Germany. (Link, October 2025)
I registered for IROS 2025. See you in Hangzhou!
”“Doppler-SLAM” was accepted by RA-L 2025 (July 2025)
“RaI-SLAM” was accepted by RA-L 2025 (March 2025)
Recent researches
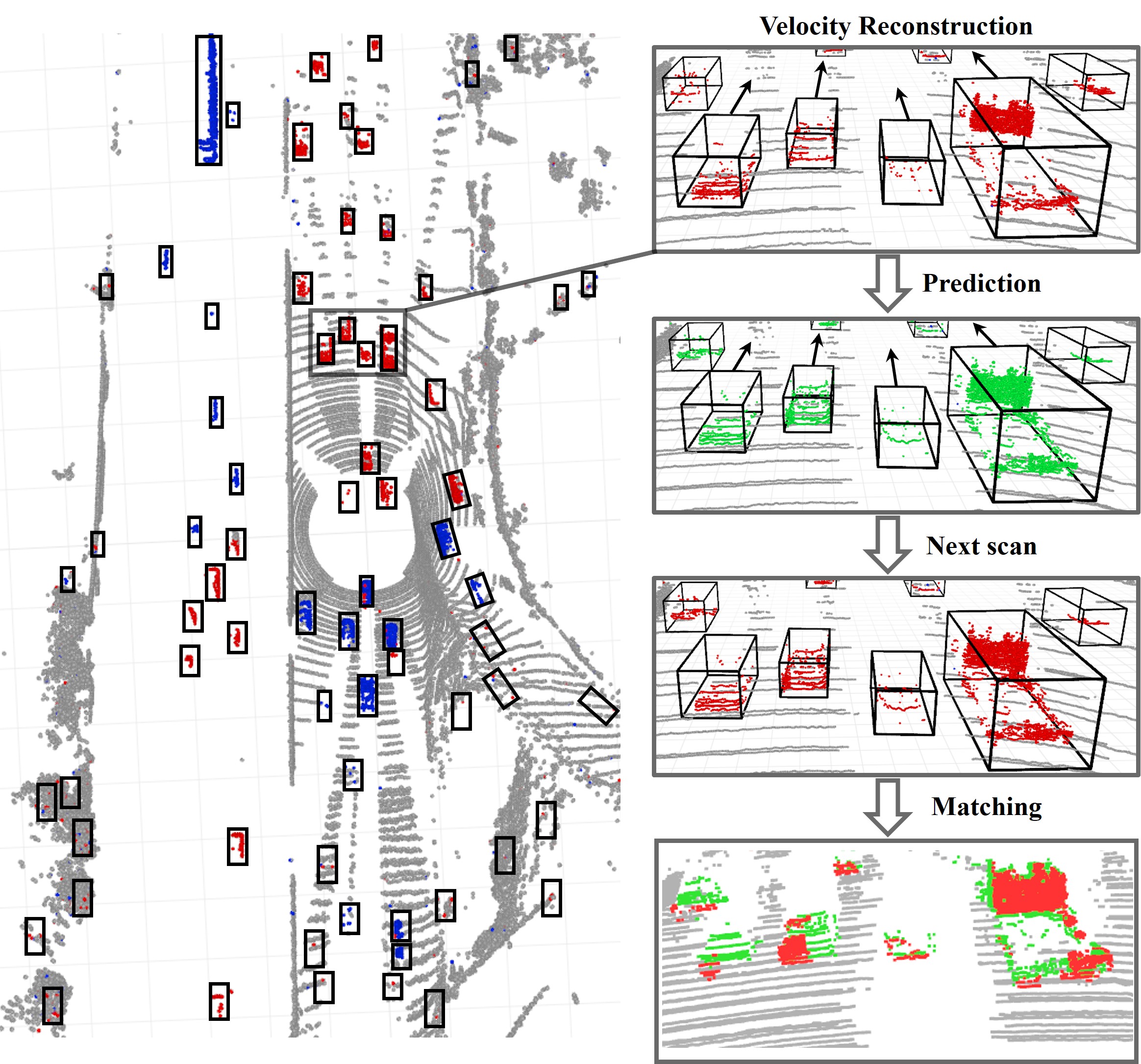 | Dong Wang, Daniel Casado Herraez, Stefan May, Andreas Nuchter under review (arxiv), 2025 paper | website | code | datasetWe introduce Dynamic-ICP, a Doppler-aware registration framework. The method (i) estimates ego motion from per-point Doppler velocity via robust regression and builds a velocity filter, (ii) clusters dynamic objects and reconstructs object-wise translational velocities from ego-compensated radial measurements, (iii) predicts dynamic points with a constant-velocity model, and (iv) aligns scans using a compact objective that combines point-to-plane geometry residual with a translation-invariant, rotation-only Doppler residual. |
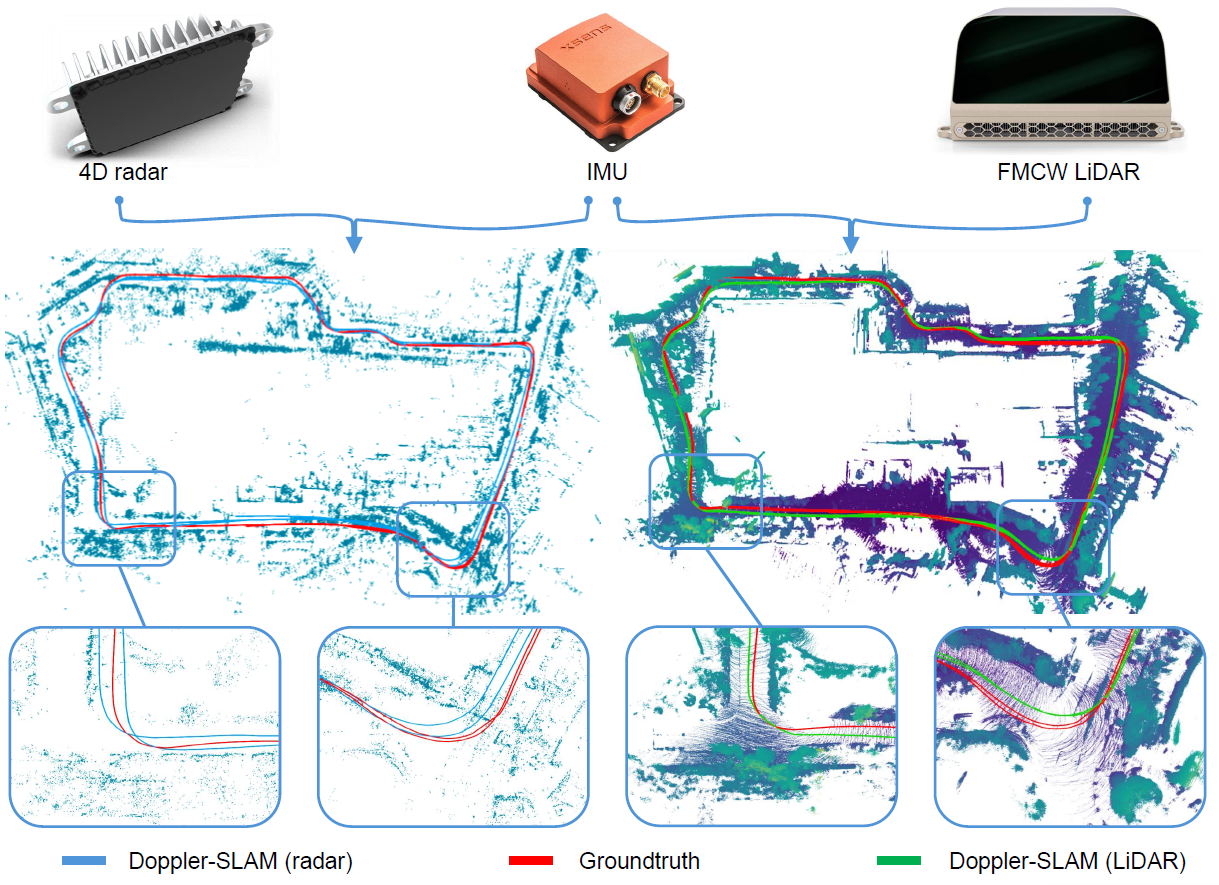 | Dong Wang, Hannes Haag, Daniel Casado Herraez, Stefan May, Cyrill Stachniss, Andreas Nuchter IEEE Robotics and Automation Letters (RA-L), 2025 paper | website | code | datasetWe propose a novel Doppler-aided radar-inertial and LiDAR-inertial SLAM framework that leverages the complementary strengths of 4D radar, FMCW LiDAR, and inertial measurement units. |
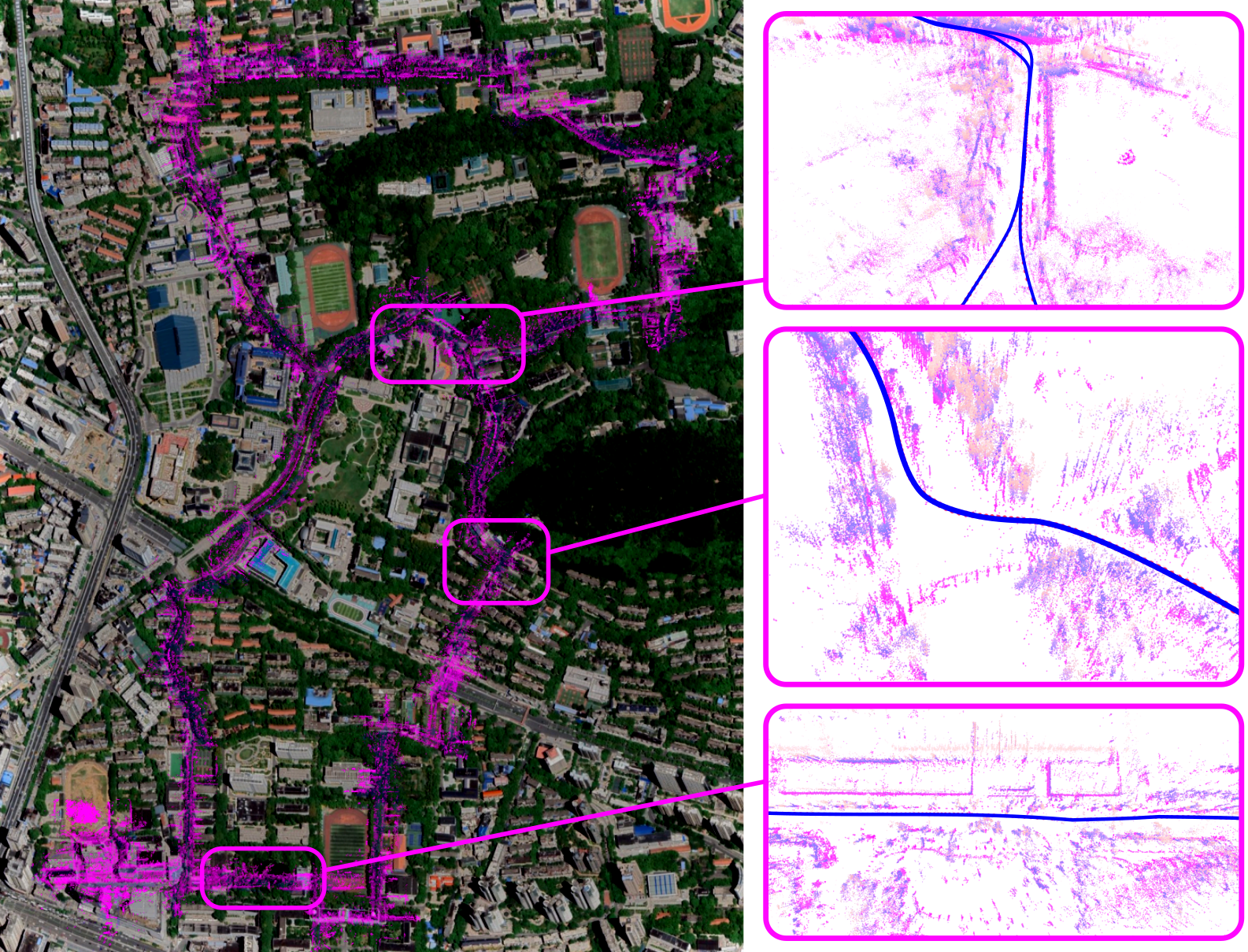 | Daniel Casado Herraez, Matthias Zeller, Dong Wang, Jens Behley, Michael Heidingsfeld Cyrill Stachniss IEEE Robotics and Automation Letters (RA-L), 2025 paper | codeWe propose a modular approach that performs radar-inertial SLAM by fully leveraging the characteristics of automotive consumer-vehicle radar sensors. |