
About Me
Hi — I’m Dong Wang (王东), a Ph.D. candidate in Robotics at Julius-Maximilians-University Würzburg (JMU), supervised by Prof. Dr. Andreas Nüchter and Prof. Dr. Stefan May. My research focuses on SLAM and Spatial AI. I work on Multimodal Perception (LiDAR, radar, cameras, IMUs, ultrasound) that enable mobile robots to localize and map reliably in the exteme, dynamic conditions of the real world.
I hold an M.Sc. in Robotics from Friedrich-Alexander-Universität Erlangen-Nürnberg, where I devised a 3D pathplanning framework for multi-UAV systems, and a joint B.Sc.and B.Eng. in Mechatronics from Tongji University and the Nuremberg Institute of Technology.
Alongside my doctoral studies I
- work as a Research Associate at JMU, supervising undergraduate thesis projects,
- have led the AutonOhm software team, winners at the RoboCup German Open Rescue 2021 and 2022 and 4 ᵗʰ place in Industrial @ Work 2023,
- and worked as a Software Developer at Evocortex GmbH from 2020 to 2024, delivering perception and autonomy stacks for next-generation AMRs and UAVs.
News
I am currently co-founding Harsher, a startup developing radar-first perception, localization, and safety systems for heavy machinery and outdoor service robots operating in harsh environments.
Our paper “Edge Radar Material Classification Under Geometry Shifts” has been accepted for presentation at the ICRA 2026 Workshop on Long-term Deployments in the Wild (LoWi 2026). The paper will be presented by Jannik Hohmann at the workshop. (April 2026)
“Dynamic-ICP” was accepted to RA-L 2026 (February 2026)
I have registered for ICRA 2026, where I will be presenting a talk on Doppler SLAM. See you in Vienna!
Our new work “Multi-Session Mapping and Long-Term Localization for Autonomous Vehicles Using Radar” was accepted for publication in the IEEE Robotics and Automation Letters (RA-L 2025)! (Dec. 2025)
I am delighted to have received the 2025 BayWiss Prize for “Outstanding or pioneering research achievements in the respective scientific field” in Bavaria, Germany. (Link, October 2025)
I registered for IROS 2025. See you in Hangzhou!
”“Doppler-SLAM” was accepted by RA-L 2025 (July 2025)
“RaI-SLAM” was accepted by RA-L 2025 (March 2025)
Recent researches
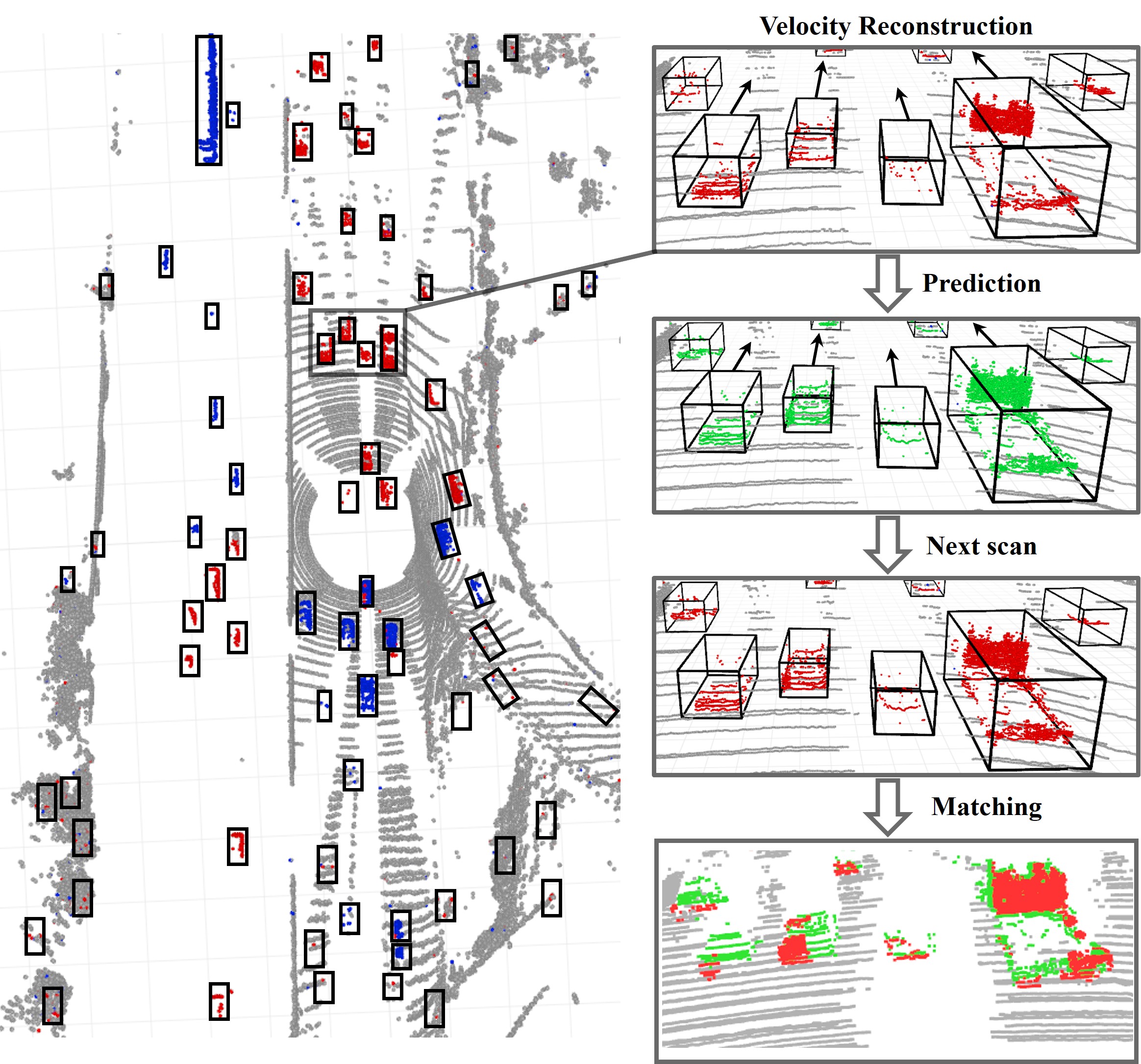 | Dong Wang, Daniel Casado Herraez, Stefan May, Andreas Nuchter IEEE Robotics and Automation Letters (RA-L), 2026 paper | website | code | datasetWe introduce Dynamic-ICP, a Doppler-aware registration framework. The method (i) estimates ego motion from per-point Doppler velocity via robust regression and builds a velocity filter, (ii) clusters dynamic objects and reconstructs object-wise translational velocities from ego-compensated radial measurements, (iii) predicts dynamic points with a constant-velocity model, and (iv) aligns scans using a compact objective that combines point-to-plane geometry residual with a translation-invariant, rotation-only Doppler residual. |
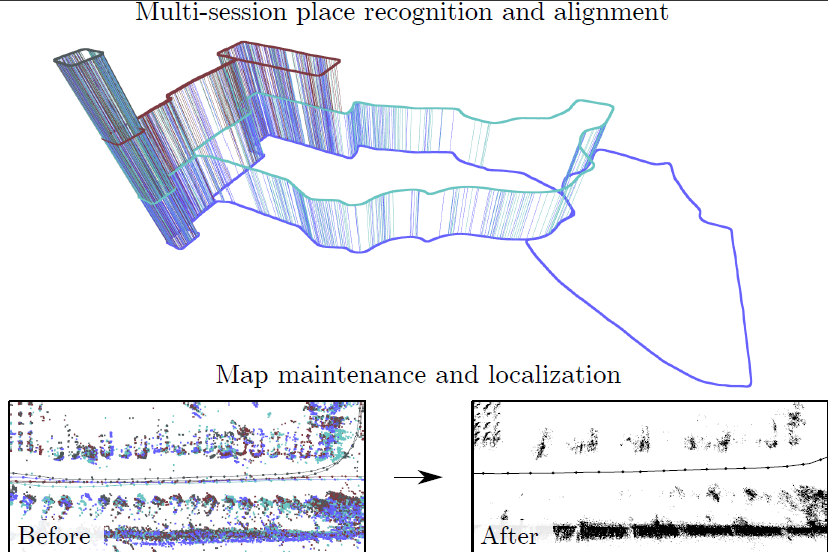 | Daniel Casado Herraez, Matthias Zeller, Dong Wang, Jens Behley, Michael Heidingsfeld, Cyrill Stachniss IEEE Robotics and Automation Letters (RA-L), 2026 paper |In our approach, we construct maps of coinciding areas and align them by performing place recognition between them. Additionally, our multi-sequence loop detection and verification strategy for radar sensors is able to filter incorrect loop matches enhancing trajectory alignment. Then, our novel map maintenance module handles radar noise and preserves persistent map points that remain reliable for localization. Subsequently, we estimate the robot poses in the resulting map by combining local odometry with scan-to-map matching, overcoming the complexities of sparse automotive radar data. |
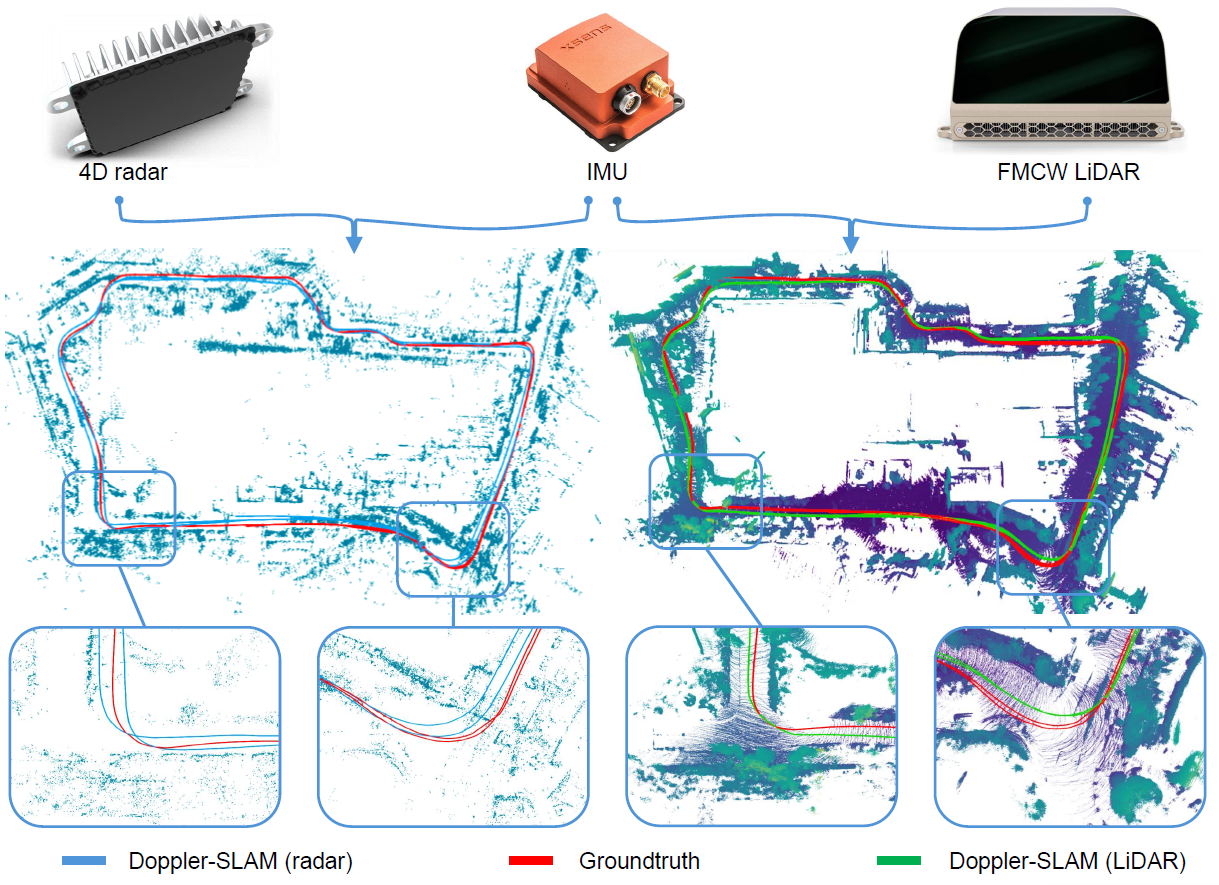 | Dong Wang, Hannes Haag, Daniel Casado Herraez, Stefan May, Cyrill Stachniss, Andreas Nuchter IEEE Robotics and Automation Letters (RA-L), 2025 paper | website | code | datasetWe propose a novel Doppler-aided radar-inertial and LiDAR-inertial SLAM framework that leverages the complementary strengths of 4D radar, FMCW LiDAR, and inertial measurement units. |
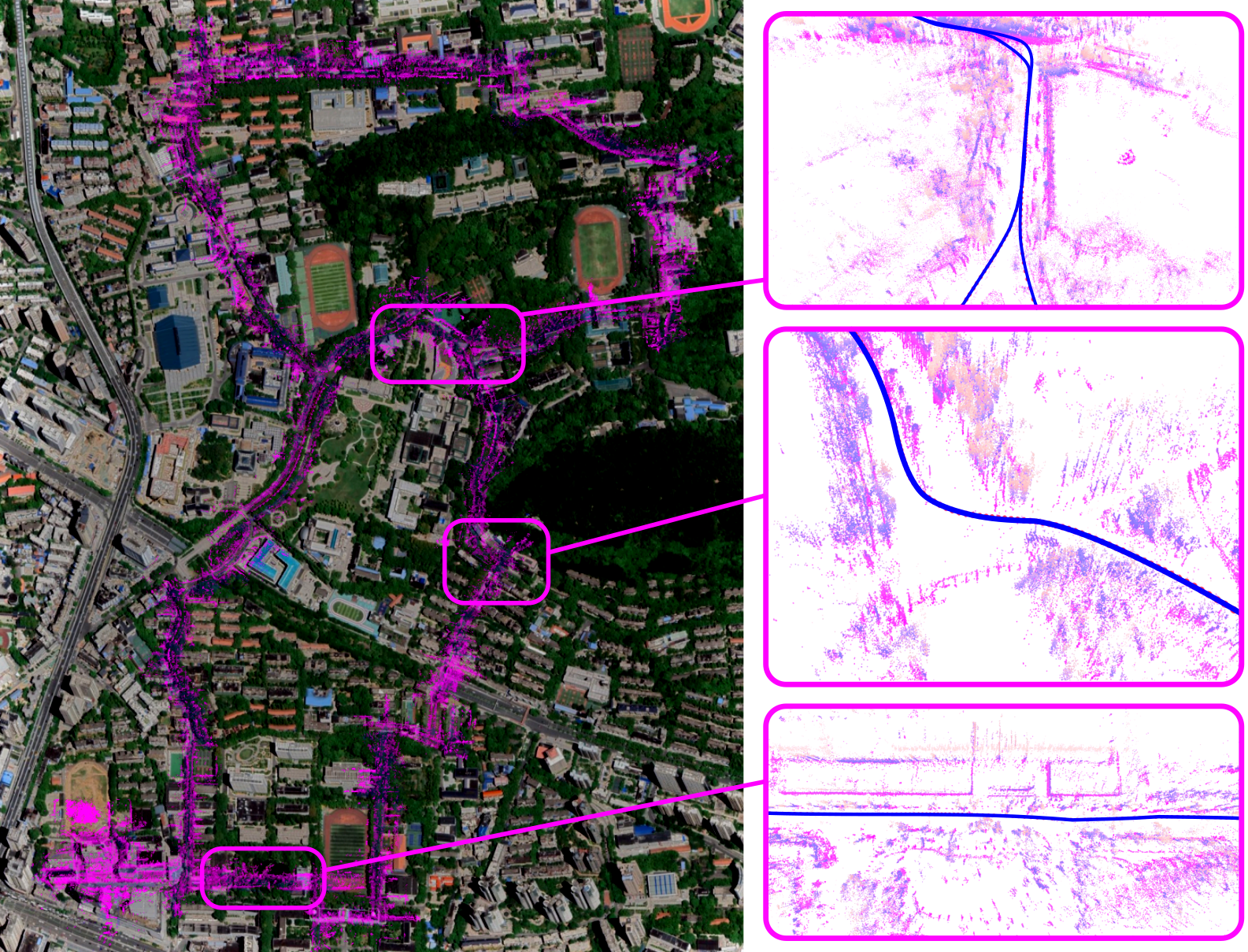 | Daniel Casado Herraez, Matthias Zeller, Dong Wang, Jens Behley, Michael Heidingsfeld, Cyrill Stachniss IEEE Robotics and Automation Letters (RA-L), 2025 paper | codeWe propose a modular approach that performs radar-inertial SLAM by fully leveraging the characteristics of automotive consumer-vehicle radar sensors. |